









 The Government Circuit: Driving Resiliency and Economic Security on Both Sides of the Atlantic
The Government Circuit: Driving Resiliency and Economic Security on Both Sides of the Atlantic American Made Advocacy: Taking the Fight to Capitol Hill
American Made Advocacy: Taking the Fight to Capitol Hill Defense Speak Interpreted: SWaPing Nanosatellites for Defense Systems
Defense Speak Interpreted: SWaPing Nanosatellites for Defense SystemsNASA's Asteroid Redirect Mission Completes Robotic Design Milestone
August 16, 2016 | NASAEstimated reading time: 4 minutes
Following a key program review, NASA approved the Asteroid Redirect Mission (ARM) to proceed to the next phase of design and development for the mission’s robotic segment. ARM is a two-part mission that will integrate robotic and crewed spacecraft operations in the proving ground of deep space to demonstrate key capabilities needed for NASA’s journey to Mars.
The milestone, known as Key Decision Point-B, or KDP-B, was conducted in July and formally approved by agency management Aug. 15. It is one in a series of project lifecycle milestones that every spaceflight mission for the agency passes as it progresses toward launch. At KDP-B, NASA established the content, cost, and schedule commitments for Phase B activities.
Earlier this year, NASA updated the target launch date for the robotic mission to December 2021 in order to incorporate acquisition of the industry robotic spacecraft development into the project schedule. To reflect this new target date, the project's cost cap was increased at KDP-B from $1.25 billion to $1.4 billion. This figure does not include the launch vehicle or the post-launch operations phase. The crewed segment, targeted for launch in 2026, remains in an early mission concept phase, or pre-formulation.
The robotic ARM will demonstrate advanced, high-power, high-throughput solar electric propulsion; advanced autonomous high-speed proximity operations at a low-gravity planetary body; controlled touchdown and liftoff with a multi-ton mass from a low-gravity planetary body, astronaut spacewalk activities for sample selection, extraction, containment and return; and mission operations of integrated robotic and crewed vehicle stack—all key components of future in-space operations for human missions to Mars.
During Phase B of the robotic mission, the program will develop a baseline mission design to meet requirements consistent with NASA’s direction on risk, cost and schedule, and will conduct an independent review of the baseline project design.
“This is an exciting milestone for the Asteroid Redirect Mission,” said NASA Associate Administrator Robert Lightfoot. “Not only is ARM leveraging agency-wide capabilities, it will test a number of new technologies already in development.”
Completing KDP-B is a catalyst for increased external involvement in the robotic mission development, explained Michele Gates, program director for ARM at NASA Headquarters in Washington.
“Since its early formulation, NASA has invited mission concept feedback and development ideas from the planetary science community, general public, U.S. and global industry, and international partners,” said Gates. “With KDP-B under our belt, ARM can now move forward to define partnerships and opportunities for long-term engagement.”
The robotic ARM project, led by NASA’s Jet Propulsion Laboratory (JPL) in Pasadena, California, will issue a request for proposals for the spacecraft to a set of aerospace companies that previously worked with the ARM robotic design team on a six-month study of spacecraft concepts to meet mission requirements. KDP-B serves as authority for JPL to proceed with the next procurement phase.
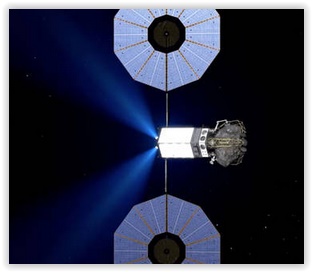
Animated concept image showing how the asteroid redirect robotic vehicle will conduct a planetary defense demonstration.
Before beginning its trip to lunar orbit, the ARM spacecraft will demonstrate a widely supported asteroid deflection technique called a gravity tractor. The spacecraft plus the mass of the captured boulder will create a small gravitational attraction to alter the orbit of the large asteroid.
NASA plans to issue a solicitation in September that will include a call for partner-provided payloads on the robotic flight system. This call for partner-provided payloads is in addition to potential cooperation under discussion with the Italian Space Agency. NASA will provide spacecraft integration, power, data storage and communication capabilities for selected payloads, which the agency will choose based on contributions to both partner goals and ARM objectives, with consideration for those that may support risk reduction for the mission.
This solicitation also will include a membership call for an ARM Investigation Team, which will be a multidisciplinary group of U.S. industry, academia, government, and international members. The Investigation Team will operate on an initial three-to-five year term, providing technical expertise to the ARM robotic and crewed project teams.
The team will conduct analyses of spacecraft and mission design, and investigate concepts to support robotic mission objectives, including overall science, planetary defense, asteroid resource use, and deep-space capability demonstrations. Led out of NASA’s Langley Research Center in Hampton, Virginia, the Investigation Team work will continue some of the research conducted by the ARM Formulation Assessment and Support Team, which helped define mission concepts and inform mission requirements and risks over a three-month period in 2015.
The robotic component of the ARM will demonstrate the world’s most advanced and most efficient solar electric propulsion system as it travels to a near-Earth asteroid (NEA). NEAs are asteroids that are fewer than 121 million miles (1.3 AU) from the sun at the closest point in their orbit. Although the target asteroid is not expected to be officially selected until 2020, NASA is using 2008 EV5 as the reference asteroid while the search continues for potential alternates.
A target asteroid such as 2008 EV5 is particularly appealing to the scientific, exploration, and industrial communities because it is a primitive, C-type (carbonaceous) asteroid, believed to be rich in volatiles, water, and organic compounds. The ability to extract core samples from the captured boulder will allow us to evaluate how its composition varies with depth and could unlock clues to the origins of our solar system. Astronaut sampling and potential commercial activities could indicate the value of C-type asteroids for commercial mining purposes, which in turn could have significant impacts on how deep space missions are designed in the future.
After collecting a multi-ton boulder from the asteroid, the robotic spacecraft will slowly redirect the boulder to an orbit around the moon, using the moon’s gravity for an assist, where NASA plans to conduct a series of proving ground missions in the 2020s. There, astronauts will be able to select, extract, collect, and return samples from the multi-ton asteroid mass, and conduct other human-robotic and spacecraft operations in the proving ground that will validate concepts for NASA’s journey to Mars.
Share on:




Suggested Items
Cicor Records Solid Growth in Q1
04/16/2024 | CicorThe Cicor Group continued to grow in the first three months of the year. Quarterly sales increased by 11.8% to CHF 107.3 million compared to the first quarter of the previous year (Q1/2023: CHF 96.0 million).
TT Electronics Awarded Contract with Kongsberg Defence and Aerospace
04/11/2024 | TT ElectronicsTT Electronics, a leading provider of global manufacturing solutions and engineered technologies, announced today that its Fairford UK business has been awarded a new contract with long-standing customer Kongsberg Defence and Aerospace (Kongsberg) for the production of complex cable harness solutions.
Cicor Successfully Completes Acquisition of TT Electronics IoT Solutions Ltd.
04/03/2024 | CicorThe Cicor Group has successfully completed the acquisition of TT Electronics IoT Solutions Ltd. with three production sites in the UK and China.
Absolute EMS Successfully Recertifies ISO 9001:2015 and AS9100 Standards
03/26/2024 | Absolute EMS, Inc.Absolute EMS, Inc., an award-winning EMS provider of turnkey contract manufacturing services, is proud to announce the successful recertification of its ISO 9001:2015 and AS9100 Rev D SAE International Aerospace Standards.
Arlon EMC Receives IPC-4101 QPL Recertification
03/20/2024 | Arlon Electronic MaterialsArlon Electronic Materials has successfully completed an intensive two-day recertification audit by IPC Validation Services that examined Arlon’s manufacturing processes and testing procedures to assure that they are in conformance to the requirements of IPC-4101E-WAM1, the Specification for Base Materials for Rigid and Multilayer Printed Boards.