









 The Government Circuit: Driving Resiliency and Economic Security on Both Sides of the Atlantic
The Government Circuit: Driving Resiliency and Economic Security on Both Sides of the Atlantic American Made Advocacy: Taking the Fight to Capitol Hill
American Made Advocacy: Taking the Fight to Capitol Hill Defense Speak Interpreted: SWaPing Nanosatellites for Defense Systems
Defense Speak Interpreted: SWaPing Nanosatellites for Defense SystemsMicrobots Individually Controlled Using 'Mini Force Fields'
January 13, 2016 | Purdue UniversityEstimated reading time: 3 minutes
Researchers are using a technology likened to "mini force fields" to independently control individual microrobots operating within groups, an advance aimed at using the tiny machines in areas including manufacturing and medicine.
Until now it was only possible to control groups of microbots to move generally in unison, said David Cappelleri, an assistant professor of mechanical engineering at Purdue University.
"The reason we want independent movement of each robot is so they can do cooperative manipulation tasks," he said. "Think of ants. They can independently move, yet all work together to perform tasks such as lifting and moving things. We want to be able to control them individually so we can have some robots here doing one thing, and some robots there doing something else at the same time."
Findings are detailed in a research paper appearing this month in the journal Micromachines. Postdoctoral research associates Sagar Chowdhury and Wuming Jing, and Cappelleri authored the paper.
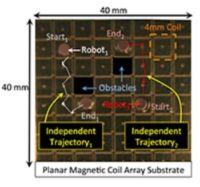
The team developed a system for controlling the robots with individual magnetic fields from an array of tiny planar coils.
"The robots are too small to put batteries on them, so they can't have onboard power," Cappelleri said. "You need to use an external way to power them. We use magnetic fields to generate forces on the robots. It's like using mini force fields."
The research is revealing precisely how to control the robots individually.
"We need to know, if a robot is here and it needs to go there, how much force needs to be applied to the robot to get it from point A to point B?" Cappelleri said. "Once you figure out what that force has to be, then we say, what kind of magnetic field strength do we need to generate that force?"
The microbots are magnetic disks that slide across a surface. While the versions studied are around 2 millimeters in diameter – about twice the size of a pinhead - researches aim to create microbots that are around 250 microns in diameter, or roughly the size of a dust mite.
In previously developed systems the microbots were controlled using fewer coils located around the perimeter of the "workspace" containing the tiny machines. However, this "global" field is not fine enough to control individual microrobots independently.
Page 1 of 2
Share on:




Suggested Items
Insulectro’s 'Storekeepers' Extend Their Welcome to Technology Village at IPC APEX EXPO
04/03/2024 | InsulectroInsulectro, the largest distributor of materials for use in the manufacture of PCBs and printed electronics, welcomes attendees to its TECHNOLOGY VILLAGE during this year’s IPC APEX EXPO at the Anaheim Convention Center, April 9-11, 2024.
ENNOVI Introduces a New Flexible Circuit Production Process for Low Voltage Connectivity in EV Battery Cell Contacting Systems
04/03/2024 | PRNewswireENNOVI, a mobility electrification solutions partner, introduces a more advanced and sustainable way of producing flexible circuits for low voltage signals in electric vehicle (EV) battery cell contacting systems.
Heavy Copper PCBs: Bridging the Gap Between Design and Fabrication, Part 1
04/01/2024 | Yash Sutariya, Saturn Electronics ServicesThey call me Sparky. This is due to my talent for getting shocked by a variety of voltages and because I cannot seem to keep my hands out of power control cabinets. While I do not have the time to throw the knife switch to the off position, that doesn’t stop me from sticking screwdrivers into the fuse boxes. In all honesty, I’m lucky to be alive. Fortunately, I also have a talent for building high-voltage heavy copper circuit boards. Since this is where I spend most of my time, I can guide you through some potential design for manufacturability (DFM) hazards you may encounter with heavy copper design.
Trouble in Your Tank: Supporting IC Substrates and Advanced Packaging, Part 5
03/19/2024 | Michael Carano -- Column: Trouble in Your TankDirect metallization systems based on conductive graphite or carbon dispersion are quickly gaining acceptance worldwide. Indeed, the environmental and productivity gains one can achieve with these processes are outstanding. In today’s highly competitive and litigious environment, direct metallization reduces costs associated with compliance, waste treatment, and legal issues related to chemical exposure. What makes these processes leaders in the direct metallization space?
AT&S Shines with Purest Copper on World Recycling Day
03/18/2024 | AT&SThe Styrian microelectronics specialist AT&S is taking World Recycling Day as an opportunity to review the progress that has been made in recent months at its sites around the world in terms of the efficient use of resources: