







 The Government Circuit: Driving Resiliency and Economic Security on Both Sides of the Atlantic
The Government Circuit: Driving Resiliency and Economic Security on Both Sides of the Atlantic American Made Advocacy: Taking the Fight to Capitol Hill
American Made Advocacy: Taking the Fight to Capitol Hill Defense Speak Interpreted: SWaPing Nanosatellites for Defense Systems
Defense Speak Interpreted: SWaPing Nanosatellites for Defense SystemsKraken Announces $3 Million of Government of Canada Funding for ThunderFish XL Development
August 31, 2020 | Globe NewswireEstimated reading time: 1 minute
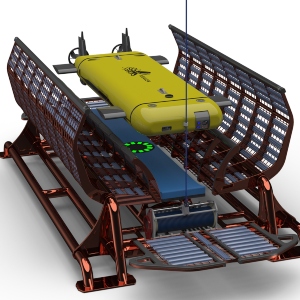
Kraken Robotics Inc., Canada’s Ocean Company, is pleased to announce that it will receive a $2,909,891 non-refundable financial contribution from the National Research Council of Canada’s Industrial Research Assistance Program (NRC-IRAP). The funding will be received over a 26-month project period and will be used to support the development of Kraken’s seabed resident ThunderFish® XL Autonomous Underwater Vehicle.
Building from the previous development efforts of the ThunderFish® Alpha AUV, the ThunderFish® XL AUV will be larger and with an increased depth rating, have a larger payload capacity and have longer mission endurance. Most importantly, the ThunderFish® XL will have key capabilities that are lacking with similar underwater vehicles in the industry today. These include: 1) the ability to transition from high-speed survey mode to “zero” speed hovering mode in-mission; 2) through-the sensor acoustic, laser and optical target detection, image recognition and inspection; and, 3) using onboard sensors to improve vehicle navigational accuracy.
ThunderFish® XL will be depth rated to 6,000 metres and carry an array of sensors and custom payload modules, including Kraken’s AquaPix® Synthetic Aperture Sonar, SeaVision® 3D laser profiler, SeaThrust® rim-driven thrusters and SeaPower® pressure tolerant batteries. All of these will be integrated with advanced artificial intelligence algorithms onboard the vehicle. In addition, the modular design will allow for rapid sensor reconfiguration and battery replacement. Finally, Kraken will develop a conceptual design for a robust and autonomous multi-modal docking solution allowing TFXL to function as a seabed resident AUV that can run a wide variety of missions from its underwater docking station.
It should be noted that the ThunderFish® XL is significantly different from the more common “long endurance” AUVs that are prevalent today. Notable differences include:
- A much longer period of time in water;
- Period of deployment involves multiple missions;
- Vehicle may be completely shut down between missions;
- Typically utilizes a subsea docking structure for safety; and
- Typically involves charging and/or data download/communications while at dock.
Share on:




Suggested Items
TRI to Unveil New High-Throughput AOI and AXI at productronica 2023
09/15/2023 | TRITest Research, Inc. (TRI), the leading test and inspection systems provider for the electronics manufacturing industry, will join productronica 2023, which will be held at Messe München Center from November 14 – 17, 2023.
UK Space Agency Launches Consultation on Variable Liability Limits for Orbital Operations
09/15/2023 | UK Space AgencyThe proposals from the UK Space Agency follow a review into the UK’s approach to setting the amount of an operator’s liability in licences for orbital operations, a key commitment of the government’s National Space Strategy.
MediaTek Successfully Develops First Chip Using TSMC's 3nm Process, Set for Volume Production in 2024
09/14/2023 | MediaTekMediaTek and TSMC announced that MediaTek has successfully developed its first chip using TSMC's leading-edge 3nm technology, taping out MediaTek’s flagship Dimensity system-on-chip (SoC) with volume production expected next year.
MKS’ Atotech to Participate in IPCA Expo 2023
09/14/2023 | MKS’ AtotechMKS’ Atotech, a leading surface finishing brand of MKS Instruments, will participate in the upcoming IPCA Expo at Bangalore International Exhibition Centre (BIEC) and showcase its latest PCB manufacturing solutions from September 13 – 15.
Comtech Unveils New BRIDGE Solutions to Increase Access to Global Hybrid Connectivity
09/12/2023 | Business WireComtech launched its new blended, resilient, integrated, digital, global, end-to-end (BRIDGE) connectivity solutions. Comtech’s BRIDGE solutions provide portable, adaptable, full-service communications networks that can be established in a matter of hours and help “bridge the gap” for traditional satellite and terrestrial infrastructures.