









 The Government Circuit: Driving Resiliency and Economic Security on Both Sides of the Atlantic
The Government Circuit: Driving Resiliency and Economic Security on Both Sides of the Atlantic American Made Advocacy: Taking the Fight to Capitol Hill
American Made Advocacy: Taking the Fight to Capitol Hill Defense Speak Interpreted: SWaPing Nanosatellites for Defense Systems
Defense Speak Interpreted: SWaPing Nanosatellites for Defense SystemsRoofing Drone Nails Down Shingles
September 27, 2019 | University of MichiganEstimated reading time: 3 minutes
An octocopter capable of attaching asphalt shingles to roofs with a nail gun has been demonstrated at the University of Michigan.
This aerial vehicle is autonomous, meaning that it positions the nail gun on a nailing point, places the nail and moves to the next point without needing a human at the controls.
“For me, the biggest excitement of this work is in recognizing that autonomous, useful, physical interaction and construction tasks are possible with drones,” said Ella Atkins, a professor of aerospace engineering and robotics.
She added that tasks best suited to robotization are said to be “dull, dirty and dangerous,” presumably moving the human workforce on to cleaner, safer and more interesting jobs.
Already, drones spare humans some high-stakes fall risks by inspecting bridges, wind turbines and cell towers. The natural next step, according to Atkins, is to upgrade from surveillance alone to performing physical tasks.
The problem of nailing down a shingle breaks down into several smaller problems—among them telling the octocopter where the nails should go and triggering the nail gun. Atkins’ team used a system of markers and stationary cameras to enable the octocopter to precisely locate itself in space. They used this system to tell the octocopter where the nails should go.
To fire the nail gun, they first measured the force needed to compress the point of the nail gun, which must be done before a nail will deploy. Then, they wrote software that would enable the octocopter to apply that force.
The off-the-shelf version of this electric nail gun requires a trigger to be compressed as well, but the team turned that into a virtual switch. This activated when the octocopter was in position to place a nail.
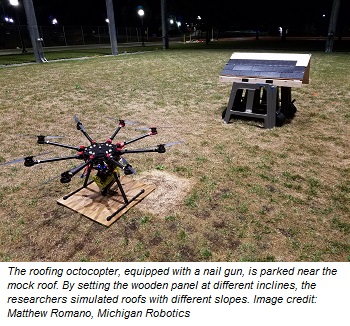
The roofing octocopter, equipped with a nail gun, is parked near the mock roof. By setting the wooden panel at different inclines, the researchers simulated roofs with different slopes. Image credit: Matthew Romano, Michigan Robotics
For now, the drone is slow compared to human roofers.
“Initially, we tried using faster approach speeds to minimize nailing time,” said Matthew Romano, a robotics Ph.D. student and first author on the paper submitted to the International Conference on Robotics and Automation. “However, for those attempts, the nail gun tip often bounced off the roof, which meant it either wouldn’t trigger or it would trigger in the wrong place.”
However, Atkins argues that it is already as fast as she and her spouse were when they put the first nails into the house they re-roofed as graduate students.
“A novice roofer—who’s never climbed on a roof, who’s never used a nail gun—they start out slow. That learning process, the evolution from them being a complete novice to being successful, is something that we’ll need to see in this system as well,” she said.
In addition to speed, the team identified other improvements that would be needed for a practical system. First, it should be powered by tether rather than battery. Because both batteries and nail guns are heavy, the system can only run for a little more than ten minutes at a time. A tether would enable it to run indefinitely. And with an air line running alongside the power cable, the nail gun could be a more effective pneumatic model.
Also, a system of cameras and markers is more complicated than a roofing drone would actually need. Shingles are marked with a shiny adhesive strip, in addition to the color difference between the exposed surface and the portion that lies beneath the next layer of shingles.
“It would be pretty easy to have a camera system mounted on the octocopter that understands both the orientation of the shingle and its position,” said Atkins.
A paper on this work, titled, “Nailed it: Autonomous roofing with a nailgun-equipped octocopter,” is submitted to the International Conference on Robotics and Automation and is posted to the arXiv preprint server.
This study was funded by the National Science Foundation.
Share on:




Suggested Items
KIC’s Miles Moreau to Present Profiling Basics and Best Practices at SMTA Wisconsin Chapter PCBA Profile Workshop
01/25/2024 | KICKIC, a renowned pioneer in thermal process and temperature measurement solutions for electronics manufacturing, announces that Miles Moreau, General Manager, will be a featured speaker at the SMTA Wisconsin Chapter In-Person PCBA Profile Workshop.
The Drive Toward UHDI and Substrates
09/20/2023 | I-Connect007 Editorial TeamPanasonic’s Darren Hitchcock spoke with the I-Connect007 Editorial Team on the complexities of moving toward ultra HDI manufacturing. As we learn in this conversation, the number of shifting constraints relative to traditional PCB fabrication is quite large and can sometimes conflict with each other.
Standard Of Excellence: The Products of the Future
09/19/2023 | Anaya Vardya -- Column: Standard of ExcellenceIn my last column, I discussed cutting-edge innovations in printed circuit board technology, focusing on innovative trends in ultra HDI, embedded passives and components, green PCBs, and advanced substrate materials. This month, I’m following up with the products these new PCB technologies are destined for. Why do we need all these new technologies?
Experience ViTrox's State-of-the-Art Offerings at SMTA Guadalajara 2023 Presented by Sales Channel Partner—SMTo Engineering
09/18/2023 | ViTroxViTrox, which aims to be the world’s most trusted technology company, is excited to announce that our trusted Sales Channel Partner (SCP) in Mexico, SMTo Engineering, S.A. de C.V., will be participating in SMTA Guadalajara Expo & Tech Forum. They will be exhibiting in Booth #911 from the 25th to the 26th of October 2023, at the Expo Guadalajara in Jalisco, Mexico.
Intel Unveils Industry-Leading Glass Substrates to Meet Demand for More Powerful Compute
09/18/2023 | IntelIntel announced one of the industry’s first glass substrates for next-generation advanced packaging, planned for the latter part of this decade.